
Project information
- Category: 288 Final Project
- Client: Iowa State University
- Project date: 2018
Mars Rover
Project Background
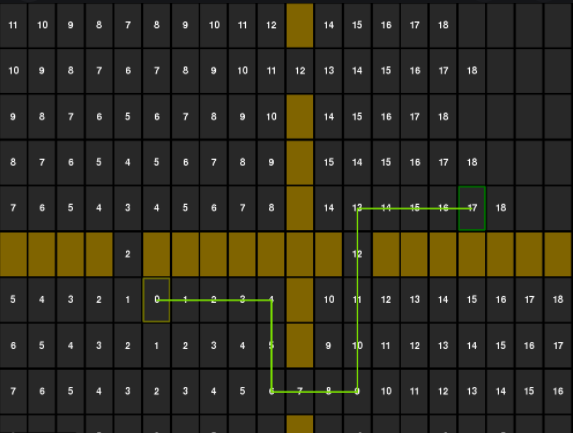
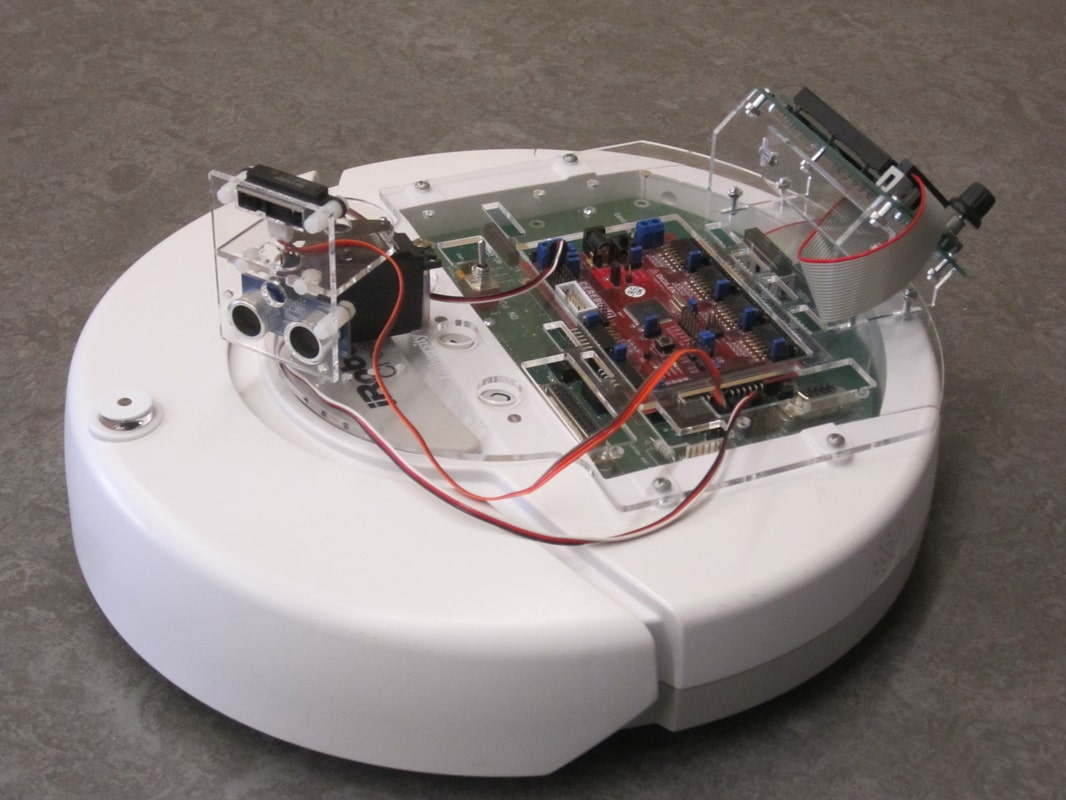
The project involved programming a specialized Roomba to navigate a treacherous obstacle course, without being able to see the robot.
Project Description
The VORTEX platform will be placed at a random position in the test field. The rover should traverse through several hazards to position itself within the retrieval zone. This project is composed of three sub goals defined in the following sections.
Because of differences in the atmosphere where the VORTEX will be used, there are areas where solar radiation could damage the VORTEX. In the test course these areas are marked off by white tape. Your rover should not to cross white tape. For the purpose of this test you can assume that the test course will be completely surrounded by white tape. The iRobot Create platform has a sensor that can sense when it crosses into the irradiated areas (see the oi_t struct related to the cliff sensor). Your team will lose points for each complete crossing. If the VORTEX platform completely leaves the test course, it will be physically placed back into the field perpendicular it where it went out.